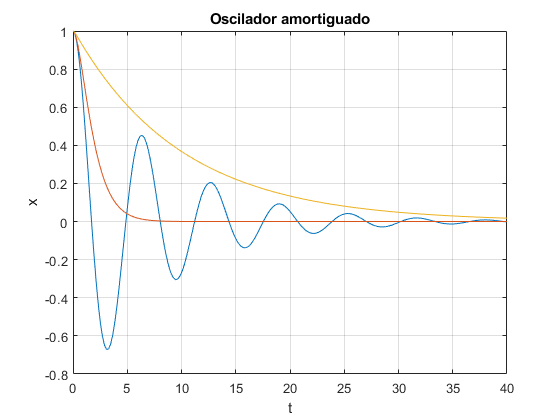
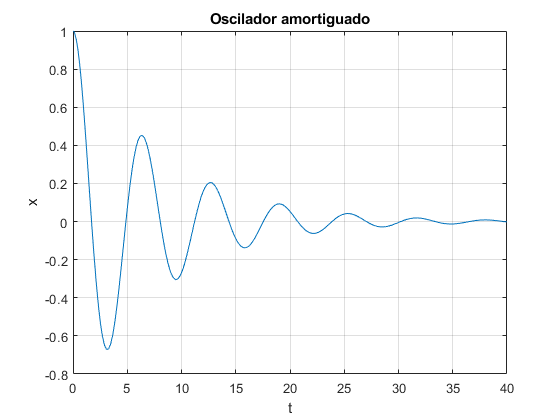
%Ej3 %a) k=20; %frecuencia angular c=5; %constante rozamiento m=20; %condiciones iniciales x0=[1,0]; % 1 es posición inicial, 0 es velocidad inicial tf=40; %tiempo final f=@(t,x) [x(2);(-c*x(2)-k*x(1))/20]; [t,x]=ode45(f,[0,tf],x0); plot(t,x(:,1)) hold on grid on xlabel('t') ylabel('x'); title('Oscilador amortiguado')
b)
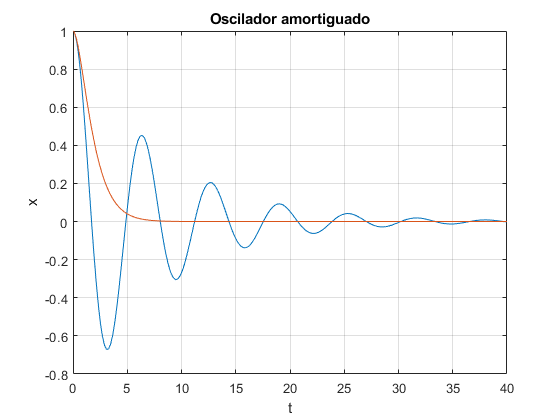
c=40; f=@(t,x) [x(2);(-c*x(2)-k*x(1))/20]; [t,x]=ode45(f,[0,tf],x0); plot(t,x(:,1)) grid on xlabel('t') ylabel('x'); title('Oscilador amortiguado')
%c) c=200; f=@(t,x) [x(2);(-c*x(2)-k*x(1))/20]; [t,x]=ode45(f,[0,tf],x0); plot(t,x(:,1)) grid on xlabel('t') ylabel('x'); title('Oscilador amortiguado')